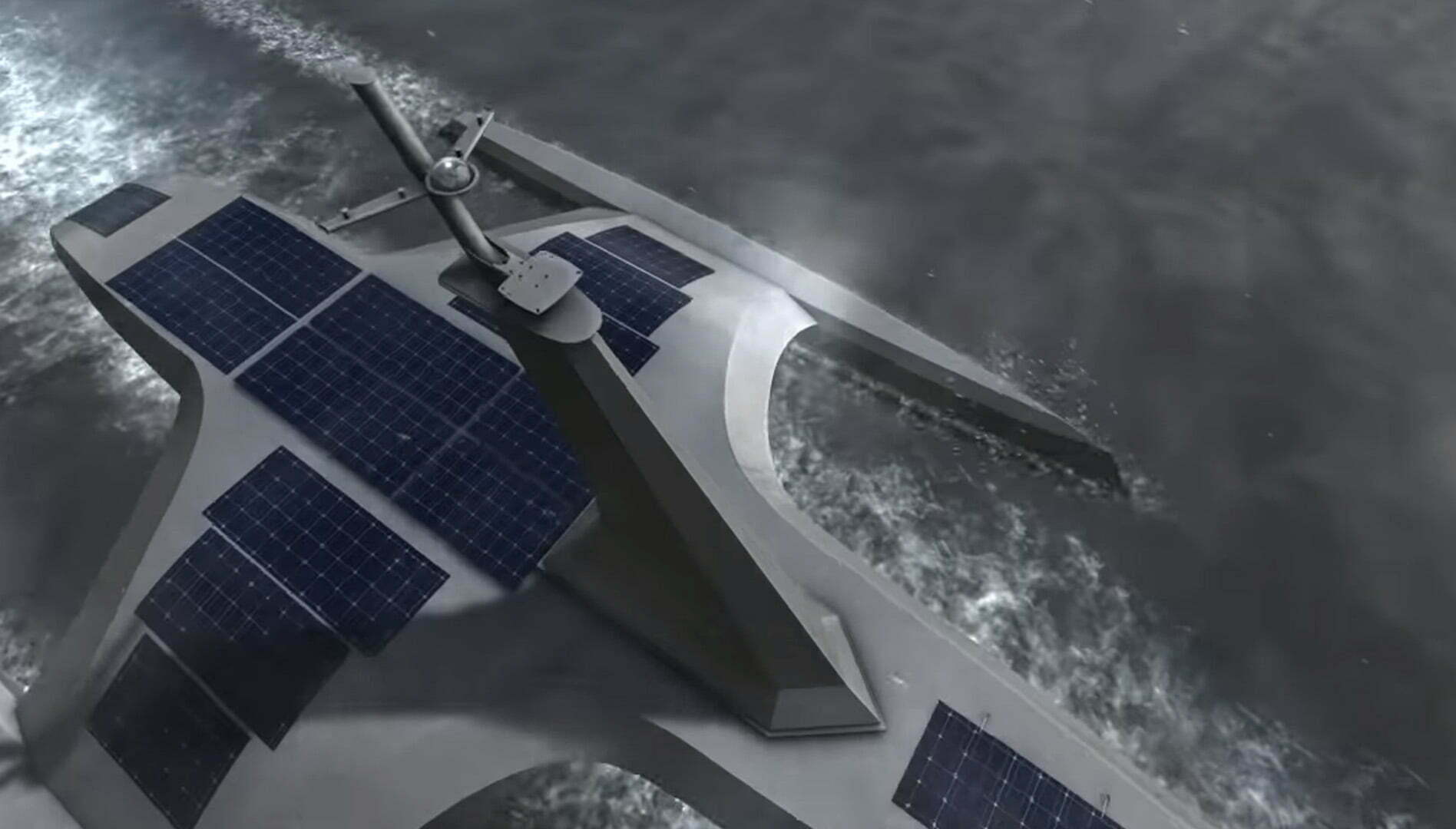
ספינה אוטונומית הפועלת על חשמל וללא צוות כלל מובילה סחורה בעלות אפסית בין יבשות. נשמע חלום רחוק? ב-IBM כבר משיטים אחת כזאת.
הספינה האוטונומית הנקראת Mayflower, על שם הספינה שהשיטה עולי רגל מאנגליה לעולם החדש במאה ה-17 ועגנה בנמל פליימות', תצא מחר להפלגה הראשונה שלה מפליימות', אנגליה לפליימות', מסצ'וסטס שבארה"ב. הספינה נבנתה על ידי הארגון המדעי-מחקרי פרומר בתמיכה של IBM. הספינה תצא כמובן ללא קפטן או צוות, והיא תנווט את דרכה בעזרת מחשב ניווט ו"קפטן" שהוא למעשה תוכנת אינטליגנציה מלאכותית, AI Captain, המשתמשת במצלמות וטכנולוגיה על מנת שלא לפגוע בעצמים אחרים ולהתמודד מול מזג האוויר במהלך המסע.

בדומה ל-Mayflower המקורית, הספינה תעשה את אותו המסע שהספינה המקורית ביצעה בשנת 1620 וזאת לרגל 400 שנה לאותו המסע. הספינה תהיה למעשה הספינה הראשונה בגודל מלא שהיא אוטונומית לחלוטין שיוצאת למסע כזה ועל פי IBM "המשימה תגדיל את הפיתוח של ספינות אוטונומיות מסחריות ותאפשר להגדיל את הפיתוח העתידי של המחקר".
העליונות הטכנולוגית שמפעילה את הספינה
הספינה אמנם לא תחובר לאינטרנט מהיר במהלך השייט, אך היא תקבל חיבוריות בעזרת המחשב האוטונומי בעל האינטליגנציה המלאכותית – NVIDIA Jetson AGX Xavier devices. למעשה, בזמן שהמייפלאוור תהיה בים, המידע שיתקבל מהחיישנים, המצלמות והניווט יעובד באופן מקומי במחשב, מה שיגדיל את מהירות קבלת ההחלטת ויקטין באופן משמעותי את המידע שזורם אל חדרי הבקרה.
"ציוד קצה הוא קריטי על מנת להפוך ספינה אוטונומית כמו המייפלאוור אפשרית וקיימת. המייפלאוור צריכה להרגיש את האווירה, לבצע החלטות חכמות לפי הסיטואציות ולפעול לפי ההחלטות בזמן הקצר ביותר שניתן, אפילו אם אין לה קישוריות לעולם החיצוני, והכל כמובן תוך שמירה על אבטחת המידע מפני איומי סייבר" אומר רוב היי, סגן נשיא והמנהל הטכני של מחשוב הקצה בחברת IBM. "פתרונות מחשוב הקצה של IBM מעוצב על מנת לתמוך בסביבת משימות-קריטיות כמו במקרה של המייפלאוור, והוא פועל יחד עם האבטחה והגמישות של מערכת ההפעלה Red Hat Linux".
דוגמה לדרך שבה המייפלאוור תפעל במקרי חירום בים:
שלב 1 – זיהוי סכנה
- הרדאר מזהה סכנות אפשרויות בדרך של המייפלאוור במרחק של 2.5 מיילים ימיים (4.5 קילומטר).
- המצלמות הנמצאות על הסיפון מספקות מידע ויזואלי לתוך מחשב ה-IBM שמזהה את הסכנה ומקטלג אותה – אוניית משא, ספינת דייג וכ"ו.
- מערכת הזיהוי האוטומטי (AIS) מספקת מידע אודות הגודל, המשקל, המהירות והמשא של הספינה.
- מערכת הניווט GPS של הספינה מספקת את המיקום הנוכחי של המייפלאוור, הכיוון, המהירות והמסלול.
- השרת הימי של המייפלאוור מספק מידע גאו-מרחבי אודות המסלול של המייפלאוור.
- תנאי מזג האוויר נלקחים בחשבון במהלך החישוב.
- החיישנים מחשבים את גובה הגלים.
- מערכת ניהול הרכב מספקת מידע תפעולי כגון מצב הסוללה, צריכת החשמל, תקשורת וכ"ו
שלב 2 – חשיבה
- מערכת קבלת ההחלטות של IBM מעריכה את הנתונים תוך התחשבות בכלי שיט אחרים באזור ויוצרת מפת סיכונים.
- הקפטן המלאכותי (AI Captain) לוקח בחשבון את המלצות מערכת קבלת ההחלטות, המידע הויזואלי, מצב מזג האוויר הנוכחי והצפוי ומחשב סיכונים.
שלב 3 – פעולה
- הקפטן המלאכותי מחליט על הפעולה הטובה ביותר בעבור המייפלאוור ומשנה את המסלול של הספינה בהתאם.
- מערכת הבטיחות של הספינה מאשר את ההחלטה בתור בטוחה.
- הקפטן המלאכותי מעביר את ההוראות למחשב ניהול הספינה כדי לשנות את המסלול והמהירות.